
分布式算法特点和适合场景
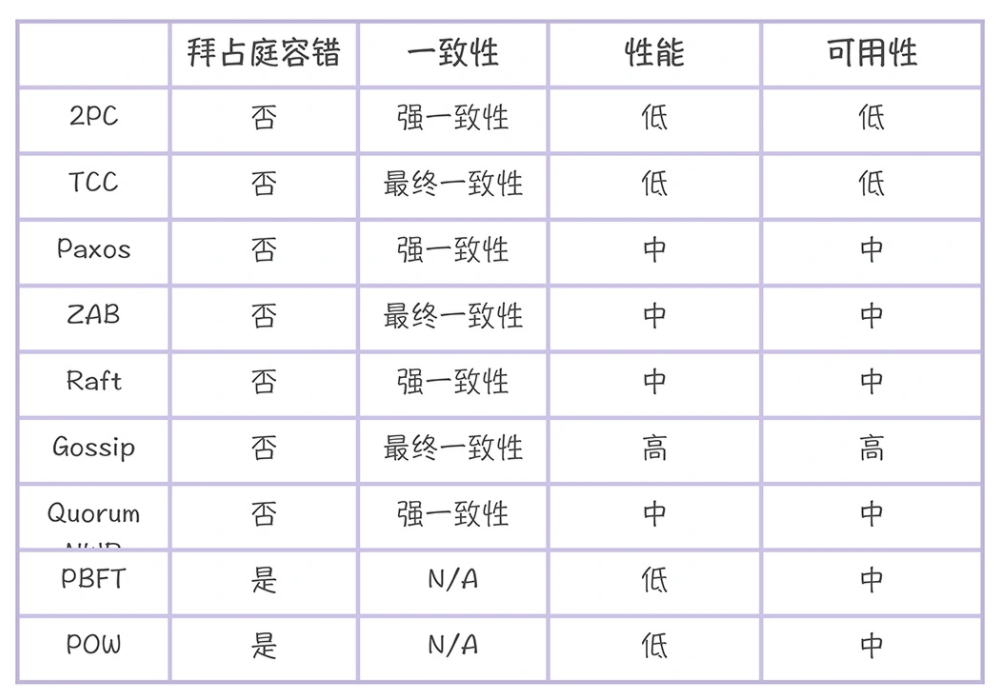
拜占庭容错
拜占庭错误:描述了一个完全不可信的场景,除了存在故障行为,还存在恶意行为。
拜占庭容错(Byzantine Fault Tolerance,BFT),是指能容忍拜占庭错误,常见算法有: POW 算法、PBFT 算法。
故障容错(Crash Fault Tolerance,CFT),即非拜占庭容错,解决的是分布式系统中存在故障,但不存在恶意节点的共识问题,常见算法有:二阶段提交协议(2PC)、TCC(Try-Confirm-Cancel)、Paxos 算法、ZAB 协议、Raft 算法、Gossip 协议、Quorum NWR 算法。
一致性
一致性分为三类。
- 强一致性:保证写操作完成后,任何后续访问都能读到更新后的值。
- 弱一致性:写操作完成后,系统不能保证后续的访问都能读到更新后的值。
- 最终一致性:保证如果对某个对象没有新的写操作了,最终所有后续访问都能读到相同的最近更新的值。
强一致性是具有多种含义的。CAP定理中的强一致性(也就是 C),可以是指 ACID 的 C,系统状态的一致性,这种一致性可以通过二阶段提交协议、TCC来实现。也可以指原子一致性(也就是线性一致性),Paxos、Raft 能实现线性一致性,而 ZooKeeper 基于读性能的考虑,它通过 ZAB 协议提供的是最终一致性。在可用性优先的系统,你可以采用 Gossip 协议来实现最终一致性,并实现 Quorum NWR 来提供强一致性。
可用性
分三层:
- 高,采用 Gossip 协议实现最终一致性系统,它的可用性是最高的,因为哪怕只有一个节点,集群还能在运行并提供服务。
- 中,其次是 Paxos 算法、ZAB 协议、Raft 算法、Quorum NWR 算法、PBFT 算法、POW 算法,它们能容忍一定数节点故障。
- 低,最后是二阶段提交协议、TCC,只有当所有节点都在运行时,才能工作,可用性最低。
性能
与可用性一样,分三层:
- 高,采用 Gossip 协议的 AP 型分布式系统,具备水平扩展能力,读写性能是最高的。
- 中,其次是 Paxos 算法、ZAB 协议、Raft 算法,因为它们都是领导者模型,写性能受限于领导者,读性能取决于一致性实现。
- 低,最后是二阶段提交协议和 TCC,因为在实现事务时,需要预留和锁定资源,性能相对低。
CAP理论
不仅是知道 CAP 不可能三角,而是要能在 C 和 A 之间,根据实际场景特点,妥协权衡折中。
分布式事务
实现分布式事务,最常用的方法是二阶段提交协议和 TCC,这两个算法的适用场景是不同的。
- 二阶段提交协议实现的是数据层面的事务,比如MySQL XA 规范采用的就是二阶段提交协议;
- TCC 实现的是业务层面的事务,比如当操作不仅仅是数据库操作,还涉及其他业务系统的访问操作时,这时就应该考虑 TCC 了。
分布式强一致性
共识(Consensus)和一致性(Consistency)是两个完全不同的概念。
- 共识:各节点就指定值(Value)达成共识,而且达成共识后的值,就不再改变了。Paxos 和 Raft 是共识算法。
- 一致性:是指写操作完成后,能否从各节点上读到最新写入的数据,如果立即能读到,就是强一致性,如果最终能读到,就是最终一致性。
需要了解 Paxos 算法,而且 ZAB 协议、Raft 算法都可以看作是 Paxos 变种,但因为 Paxos 算法的可理解性和可编程性痛点突出,所以在实际场景中,最常的共识算法是 Raft。我们可以基于 Raft 实现强一致性系统,Raft 是需要彻底掌握的。
一致哈希是常用的寻址算法,能突破集群性能的领导者限制,也是需要掌握的。
分布式最终一致性
Gossip 协议是实现最终一致性的常用方法。如果实现了最终一致性,但有时可能需要临时提供强一致性能力,这个时候,你可以用 Quorum NWR 来实现。
 《分布式技术原理与算法解析》笔记
《分布式技术原理与算法解析》笔记